

-
-
Servicio
-
Contáctenos











Sistema de conducción automática para vehículos al aire libre
El transporte de vehículos en minas a cielo abierto es el método principal para el trasporte en minería a cielo abierto y un factor clave que influye en la producción. Hunan Chuangyuan utiliza tecnología de percepción por fusión de múltiples sensores, tecnología de posicionamiento RTK de alta precisión, tecnología de optimización de trayectorias con control robusto preciso, tecnología de propulsión del chasis controlada por cable y tecnología de inteligencia artificial para desarrollar de manera independiente un sistema de conducción autónoma en minas a cielo abierto. Este sistema apoya la construcción inteligente de minas y logra el transporte sin conductor.
|
Apto para todos los vehículos de ingeniería de minas a cielo abierto |
Cargador |
Bulldozer |
Rociador |




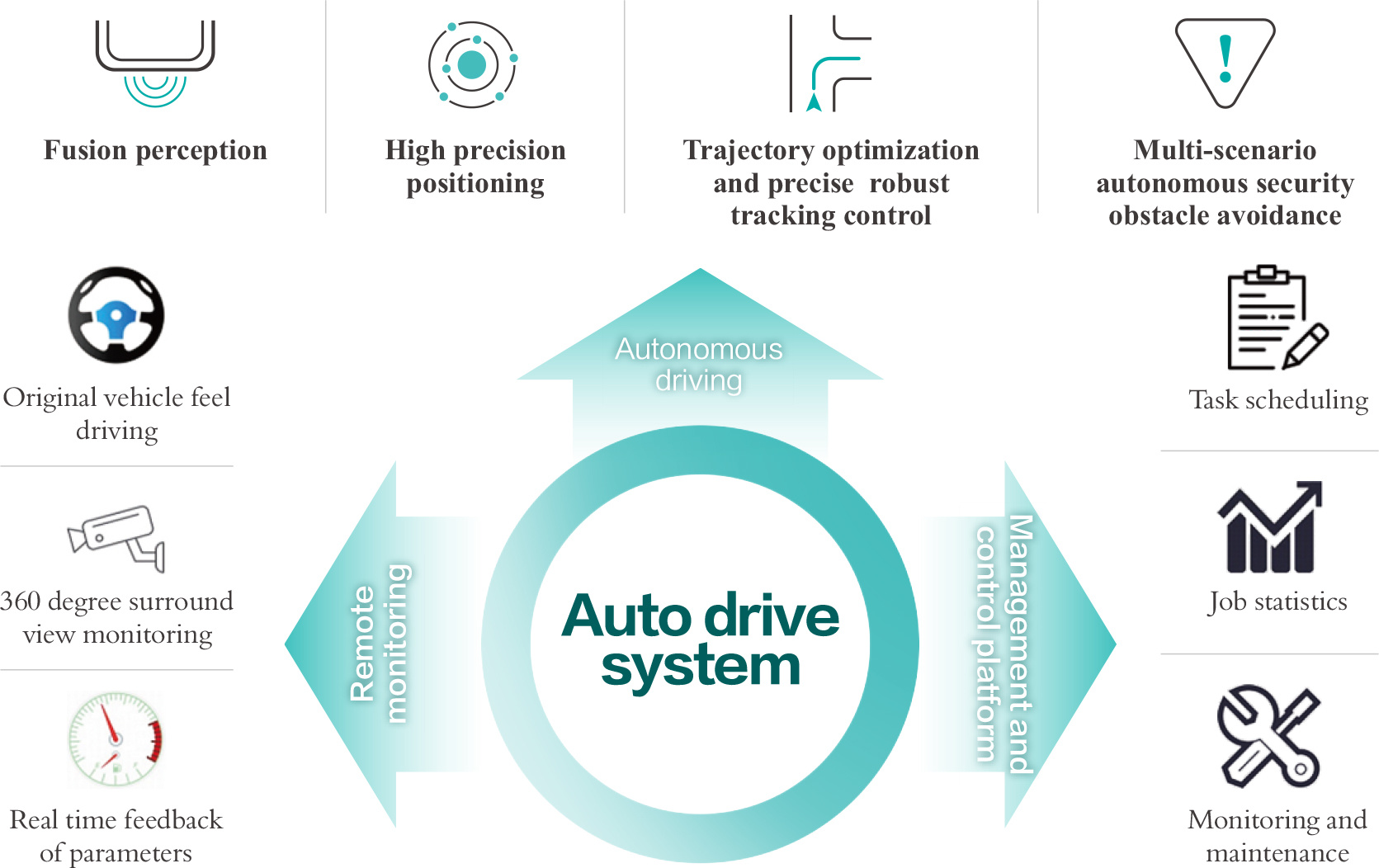
Funciones del sistema

Percepción de fusión Utilizando lidar de luz alta, cámaras de reconocimiento visual y radar de ondas milimétricas para la percepción y los cálculos de fusión, así como algoritmos de reducción de ruido LDA desarrollados de manera independiente para entornos polvorientos, el sistema logra una cobertura de percepción de 360 grados sin puntos ciegos sobre el equipo. Es capaz de realizar escaneo en tiempo real y percibir con precisión peatones, instalaciones fijas (señales, postes de servicios públicos, etc.) y obstáculos en movimiento (rocas grandes, acumulaciones, etc.) en condiciones adversas tales como polvo ligero, lluvia ligera, nieve ligera y otras situaciones difíciles. |
Seguridad Durante la operación normal del vehículo, este puede utilizar su sistema de percepción para detectar y aplicar niveles correspondientes de estrategias de evitación de obstáculos en infraestructura, obstáculos estáticos (como grandes bloques, etc.) y obstáculos dinámicos (peatones, vehículos que se aproximan). Por ejemplo, al encontrarse con vehículos que se acercan en sentido contrario, el vehículo debe ceder el paso a los vehículos más pesados; cuando se detecten peatones, deberá aplicar frenado de emergencia si estos se acercan demasiado. Si el vehículo se acerca al borde de vallas electrónicas (como escalones), debe activar el frenado de emergencia para mantener una distancia segura. En casos en que se pierdan las señales de operación autónoma o remota, se deberá realizar inmediatamente una desaceleración, seguida de detenerse de manera segura si las condiciones lo permiten. |
|
Posicionamiento de alta precisión Con posicionamiento RTK de alta precisión por satélite global, el sistema logra un seguimiento de trayectoria a nivel centimétrico, con calibración de posicionamiento por radar de punto fijo, lo que garantiza un estacionamiento de alta precisión y estabilidad. |
Control preciso y estable Utilizando tecnología de dirección y conducción controlada por cable de alta precisión, en tiempo real y altamente confiable, el sistema puede construir diseños precisos de modelos cinemáticos y dinámicos para controladores de seguimiento lateral y longitudinal en tiempo real, logrando un control preciso y estable del vehículo. |
|
Optimización de trayectoria Basándonos en las condiciones operativas reales de los equipos de transporte a cielo abierto, desarrollamos de manera independiente el algoritmo de planificación de rutas DDAS (distancia lateral de seguridad D, distancia longitudinal de seguridad D, línea base longitudinal del equipo de transporte, línea base longitudinal del equipo de carga) para lograr una alineación óptima de posicionamiento entre los equipos de transporte y los equipos de carga. |
Conducción autónoma El vehículo es capaz de arrancar, acelerar, desacelerar, frenar, dirigir y descargar automáticamente a lo largo de la ruta planificada, permitiendo operaciones de transporte cíclico autónomo sin tripulación. |
|
Toma remota Plataforma de conducción multifuncional remota, que incluye botones integrados originales para el manejo del vehículo, joysticks y pedales a ambos lados del asiento del conductor, replicando fielmente las operaciones reales en la cabina. Cuenta con una pantalla frontal de información del vehículo que muestra la velocidad, las revoluciones por minuto, la presión del aceite y más, así como una pantalla de monitoreo en tiempo real con cámara de 360 grados alrededor del vehículo. Mediante la coincidencia del ID del vehículo, permite intervenir inmediatamente en cualquier camión con capacidad de conducción autónoma para realizar intervenciones manuales. |
Programación de tareas Según el plan de producción, el sistema ingresa cada plan de transporte de vehículos. El sistema ejecutará automáticamente las tareas de producción. Permite una reasignación temporal manual en la que la autoridad humana prevalece sobre la asignación automática de tareas. |




¿En qué podemos ayudarte a encontrar?
CORREO ELECTRÓNICO
Dirección: Edificio C3, Plaza Empresarial Huanchuang, Avenida Yuelu Oeste 2450, Changsha, Provincia de Hunan, RPC.
Derechos de autor © 2025 Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.