

-
-
Servicio
-
Contáctenos











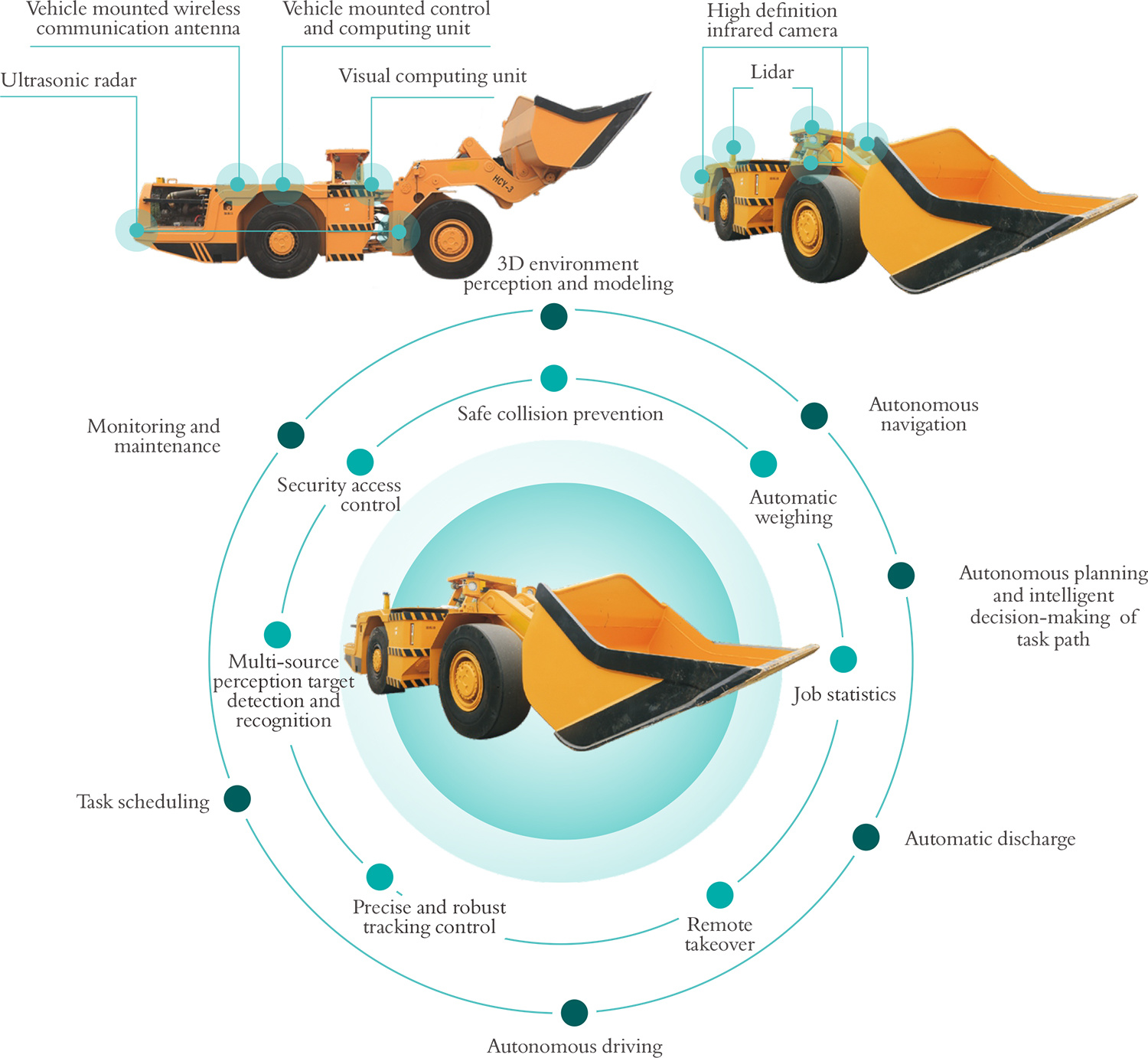
Sistema de conducción autónoma para vehículos subterráneos
El sistema de conducción autónoma para vehículos subterráneos utiliza tecnología avanzada de sensores, inteligencia artificial y tecnología de control inteligente para lograr la conducción autónoma de vehículos subterráneos. Se emplean tecnologías avanzadas de comunicación inalámbrica, control remoto y visualización para lograr una operación precisa en la descarga de mineral subterráneo mediante cargadores.
Funciones del sistema

Percepción y modelado de entornos 3D El sistema está equipado con lidar de múltiples haces para escanear y modelar las vías en tiempo real, creando un mapa visual. Percibe el entorno y rastrea el movimiento del vehículo. |
Planificación autónoma y toma de decisiones inteligente de la ruta de tareas El sistema recopila datos de percepción ambiental en tiempo real, datos de posicionamiento y datos sobre la ruta operativa mediante un proceso de demostración y enseñanza para construir un mapa topológico destinado a las tareas de operación de los raspadores. Durante la conducción autónoma, integra los datos de medición de la posición del raspador para iniciar la conducción autónoma desde cualquier posición dentro del área operativa. Planifica de manera autónoma las rutas operativas, navega por intersecciones y decide de forma inteligente acciones como detenerse en los puntos de descarga. El controlador logra un control preciso y estable del vehículo. |
|
Monitoreo y mantenimiento El diagnóstico de fallos en tiempo real y las indicaciones visuales audiovisuales ayudan a identificar rápidamente las ubicaciones y estados de los fallos. Los recordatorios integrados de mantenimiento facilitan un mantenimiento e inspecciones proactivos regulares, reduciendo el tiempo de inactividad del equipo y aumentando el tiempo operativo efectivo. |
Control de seguimiento preciso y robusto El sistema emplea una tecnología de dirección y freno-controlada por cable de alta precisión, con fuerte capacidad en tiempo real y altamente confiable, para construir modelos precisos de movimiento y parámetros dinámicos para el rascador. Diseña controladores de seguimiento longitudinal y lateral en tiempo real para lograr capacidades de control autónomo de seguimiento de alta precisión y robustez para el rascador. |
 Toma remota La plataforma remota multifuncional de conducción, que incluye botones integrados originales para el manejo del vehículo, joysticks y pedales en los apoyabrazos izquierdo y derecho del asiento del conductor, recrea la operación de una cabina de conducción real. Se utiliza una pantalla LCD completa para mostrar información en tiempo real sobre la ubicación del vehículo subterráneo, la velocidad de conducción, la información de la cuadrícula, los ángulos de pendiente, entre otros. También muestra mapas de conducción, rutas y imágenes en tiempo real desde múltiples ángulos captadas por cámaras de vigilancia. Los operadores pueden tomar el control de los vehículos subterráneos en cualquier momento. |
Estadísticas laborales Las estadísticas actuales de datos operativos rastrean automáticamente las cantidades de producción de mineral, generando informes diarios, semanales y mensuales para referencia de la producción y toma de decisiones. |
| Detección y reconocimiento de objetivos mediante percepción multi fuente El sistema utiliza lidar y cámaras estéreo para percibir datos ambientales en tiempo real, y emplea tecnología de reconocimiento de imágenes y algoritmos de redes neuronales para lograr la segmentación semántica de escenas, así como la identificación en tiempo real de áreas transitables y información sobre los bordes de las paredes dentro de las vías.
|
Seguridad Durante la conducción automatizada, el vehículo se detendrá temporalmente en las siguientes condiciones: detección de vehículos, personal o grandes piedras que caen adelante mediante lidar o cámaras visuales, presionar el botón de parada de emergencia, pérdida de la conexión de señal para el raspador, o ingreso de equipos o personal a la rejilla de seguridad. |



¿En qué podemos ayudarte a encontrar?
CORREO ELECTRÓNICO
Dirección: Edificio C3, Plaza Empresarial Huanchuang, Avenida Yuelu Oeste 2450, Changsha, Provincia de Hunan, RPC.
Derechos de autor © 2025 Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.